![]()
|
EUGABEErfahrungsorientierte Übergänge
|
|
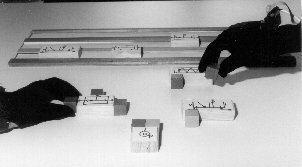
Das Real-Reality KonzeptDie Idee zu Real Reality enstand aus der Beobachtung, daß Entwurfsgruppen trotz aller Möglichkeiten der Rechnerunterstützung immer wieder gerne zu Modelliertischen und anfaßbaren Modellen zurückkommen. Auf Computersimulationen und virtuelle Modelle (z.B. CAD-Daten) kann jedoch nicht verzichtet werden. Dies macht es notwendig, Änderungen in jeweils einem der Modelle im anderen nachzuziehen -- eine ständige Fehlerquelle. Kurzüberblick:Real Reality ermöglicht es, ein anfaßbares Modell auf einem Modelliertisch zu erstellen und synchron ein virtuelles Modell als Abbild im Rechner zu erzeugen. Beim Hantieren mit den greifbaren Objekten tragen die BenutzerInnen Datenhandschuhe. Der Rechner kann aus den erzeugten Daten extrahieren, welche Aktionen auf dem Modelliertisch ausgeführt wurden. Anfaßbare Gegenstände und ihre zugehörigen virtuellen Abbilder bilden zusammen sogenannte Zwillingsobjekte. Die virtuelle Komponente enthält einfache Geometriedaten, aber auch Eigenschaften, die für eine Simulation des Modells benötigt werden. Das virtuelle Modell wird von einem Virtual Reality-Programm verwaltet und visualisiert. Es wurden verschiedene Anbindungen von Simulatoren an dieses VR-Programm entwickelt. Anfaßbare ModelleEs gibt mehrere Arten anfaßbarer Modelle. Falls die Grundbausteine klein genug sind, können die realen Objekte verwendet werden. In unserem Fall wären dies die Pneumatikschaltelemente. Es können auch verkleinerte Modelle verwendet werden. Im Projekt RUGAMS werden Fischertechnik-Modelle von Förderbändern zur Modellierung eingesetzt. Die größte Variante dieser Modelle ist sogar funktionsfähig und kann mit SPS-Programmen gesteuert werden. Die dritte Variante sind anfaßbare Symbole -- in unserem Fall Holzbausteine mit Beschriftung oder Symbolaufdruck.
Eine Alternative ist der Einsatz von Videobilderkennung. An einer solchen Bilderkennung wird im Projekt BREVIE gearbeitet
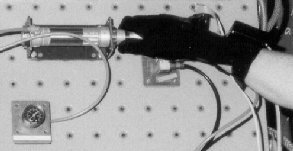
Über die auf dem Bild sichtbaren Datenhandschuhe werden Positionsdaten und Bewegungen der Hand an denGestenserver übertragen. Dieser erkennt statische Gesten, z.B. die typische Fingerhaltung beim Greifen. Solche Gesten müssen vorher definiert und vorgemacht werden. Die erkannten Gesten und ihre Position werden an das VR-Programm, das das virtuelle Modell verwaltet, weitergesandt. VR-Modelle -- der ROManDer ROMan (Real Object Manager) basiert auf dem World Tool Kit, einer VR-Software von Virtual Presence. Von ihm werden die erkannten Gesten interpretiert. Befindet sich ein Objekt an der Position einer Griffgeste, so wird dieses als gegriffen definiert. Auf diese Weise werden die zwei Modelle synchronisiert. Zu Beginn des Modellierungsvorgangs werden reale und virtuelle Modellierumgebung aneinander angeglichen. Dazu wird der im Foto hinten sichtbare Werkzeugkasten kalibriert, d.h. dem Rechner wird mitgeteilt, wo er positioniert ist und um welchen Typ von Werkzeugkasten es sich handelt. Der Kasten dient als unerschöpfliches Reservoire an Objekten. Wenn der Benutzer ein Objekt aus dem Kasten nimmt, erkennt der Rechner, was ergriffen wurde, erzeugt das virtuelle Zwillingsobjekt und gibt diesem, sobald der Gegenstand abgesetzt wurde, die entsprechende Position. Der ROMan kann auch zur Visualisierung des virtuellen Modells genutzt werden. Vorne im Bild die (virtuelle) Hand, die großen Bausteine sind Druckluftquellen.
Simulatoren: PneuSim und FluidSimWir haben Anbindungen an zwei Simulatoren realisiert. PneuSim wurde von uns selber entwickelt auf Basis des FreeWare Simulators DigSim. FluidSim ist ein kommerzieller Pneumatiksimulator von FESTO Didactic. PneuSimDigSim ist ein Simulationsprogramm für digitale Schaltungen, das in Java entwickelt wurde. Das vorhandene Simulationskonzept erwies sich als nicht geeignet für die Pneumatik und für unsere Ziele.Wir haben deshalb eine eigene Simulationskomponente entwickelt. PneuSim ermöglicht es, die Schaltung sowohl ganz, wie schrittweise simulieren zu lassen. Die Simulation ist zustandsbasiert, dh. die einzelnen Schaltelemente können sich jeweils nur in wenigen, diskreten Zuständen befinden. Der Übergang zwischen Zuständen wird anhand des aktuellen eigenen Zustands und anliegenden Drücken berechnet. Es gibt eine Dateischnittstelle, über die am Tisch fertig erstellte Modelle von Schaltungen eingelesen werden können. Die vom ROMan erzeugte Datei wird dazu in das von PneuSim gelesene Format umgewandelt. Für unsere Arbeiten zur Mensch-Maschine-Kommunikation interessanter ist die OnLine- (oder Socket-) Schnittstelle. Dabei schickt der ROMan jedes Ereignis an PneuSim weiter. Neu erzeugte Objekte erscheinen sofort in der Simulation. Auch wenn Gegenstände verschoben werden, wird dies in der Simulation sichtbar. Besonderer Clou ist jedoch, daß es möglich ist, auch Gesten zur Steuerung der Simulation selber zu verwenden. Es können Gesten definiert werden, die ein Starten und Stoppen des Simulationsmodus vom Modelliertisch aus bewirken.
FluidSimHierbei handelt es sich um ein kommerziell verfügbares, an Schulen eingesetztes Simulationsprogramm für die Pneumatik. FluidSim wurde an der Universität Paderborn in Zusammenarbeit mit FESTO Didaktik entwickelt. Das Simulationskonzept basiert auf der Lösung von Differentialgleichungen. FluidSim enthält zudem Schnittbilder der Pneumatikelemente und Fotos sowie kurze Lehrvideos. Für FluidSim haben wir in Kooperation mit den Entwicklern in Paderborn ebenfalls eine Dateischnittstelle entwickelt, über die fertig aufgebaute Schaltungen eingelesen werden können. Da uns der Programmcode nicht zugänglich ist, ist eine weitere Anbindung zur Zeit nicht möglich (wie z.B. die OnLine-Schnittstelle).
Simulation von PneumatikBei der Simulation von Pneumatikschaltungen sind einige Unterschiede zu digitalen Schaltungen zu beachten. Pneumatikelemente haben keine strikte Trennung zw. Ein- und Ausgängen. Zwar gibt es Standards, wie ein Element zu benutzen sei, technisch ist es jedoch möglich, diese Standards nicht einzuhalten. Auch dies muß in der Simulation möglich sein. Druck kann über mehrere Komponenten hindurch abfliessen, wenn ein Entlüftungsventil oder ein offener Ausgang existieren. Pneumatikelemente besitzen implizite Verzögerungszeiten (z.B. Überwinden des Anfangs-Rutsch-Widerstands eines Kolbens -- die Friktion). Wird an einem doppeltwirkenden Zylinder an beiden Seiten der gleiche Druck angelegt, so bleibt er entgegen der "naiven" Intuition stehen, weil nicht der Druck, sondern die an beiden Seiten wirkenden Kräfte verglichen werden müssen. Um die Funktionsweise der Elemente einigermaßen realistisch zu simulieren, ist also eine Beschäftigung mit der physikalischen Funktionsweise nötig; das Studieren von Entscheidungstabllen genügt nicht. Wir haben zunächst eine druckbasierte Simulation gewählt. Dies ist jedoch nicht für alle Pneumatikelemente ein angemessenes Modell. Um die Simulation zu vergenauern, werden wir in nächster Zeit auf ein Durchflußmengen-Modell umstellen. For further information contact: |