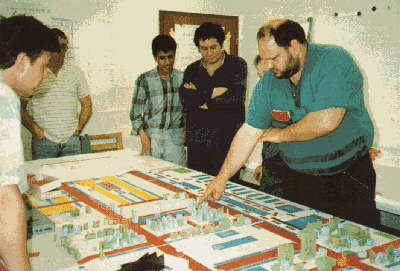
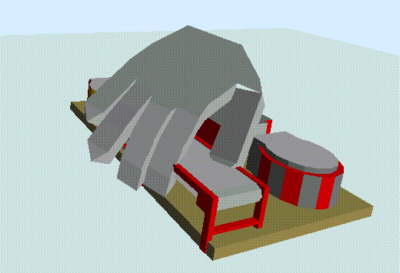
| Abstract Concrete models help us to understand, manipulate and communicate complex technical systems. Models of technical systems represent the ideas of the involved users (Fig. 1). In other approaches experts define computational models for documentation, variation, calculation and presentation (Fig. 2). But there is a gap between these worlds. We introduce the Real-Reality concept to bridge this gap. Building and manipulating a scene with concrete objects causes equivalent movements and manipulations of related virtual objects. In the computer a virtual model is defined, which can be used in the known way for computing (Fig. 3). With our Real-Reality approach we try to bring the ease and usability of playing with construction kits into the definition of complex and abstract computer models. |
|
The Concept We operate with Complex Objects, which have a real and a virtual part. A data-glove and a tracking-system couple these two parts of the objects. During the modelling process a computer identifies poses in the glove data stream falling within characteristic, previously taught grasp patterns. If this occurs in close vicinity to an object, hand and object are coupled and moved synchronously from a predefined start-position to the place where the grasp is released. The virtual model can be analysed for consequent computer processes. The movements are also recorded for later analysis. This allows the user to define dynamic behaviour for simulation and process programming. While the users act in their natural physical environment with their hands, the computer stands in the background and is ideally not noticed. |
||
|
|
|
||